Jetson NanoでPicam360を始めよう – 6: 接続する
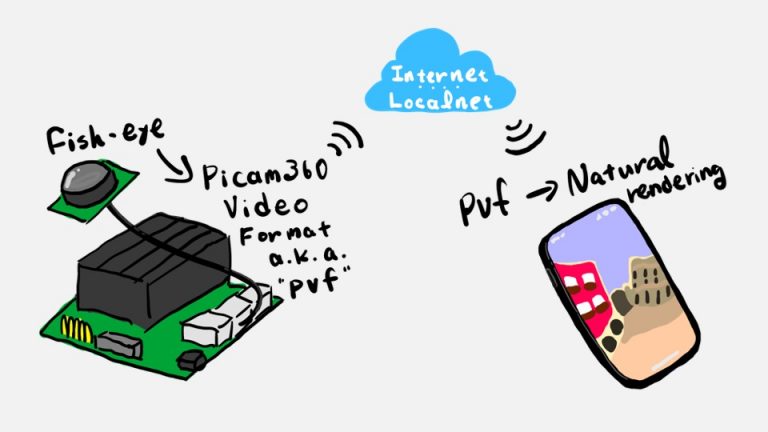
2021-05-29 2021-11-28 Picam360カメラをJetsonNanoに接続して360度映像をリアルタイムストリーミングする手順を紹介する連載、今回は最終回の第6回です。 本稿の英語版→English version is available here. こんちには、Picam360開発コミュニティのGAKUと申します。 前回の投稿ではビューワーアプリのインストール手順を紹介しました。最終回の今回はビューワーアプリからJetson NanoのPicam360に接続してリアルタイム映像を視聴するまでの手順を紹介します。 2つの接続経路 ローカルネット内接続: 同一ローカルネット内にあるJetson Nanoへ同じネットワーク内のビューワーアプリから接続します。この場合、外部ネットワークからはアクセスできません。 インターネット経由接続: WebRTCを使用してJetson Nanoへインターネット経由で接続します。外出先からスマホで自宅にあるJetson Nanoへ接続するといった使い方ができます。 事前注意 ネットワーク経由での接続性は保証されません: ローカルネットワーク、インターネット経由の接続は共にネットワーク環境によって接続できない場合があります。特にWebRTCを使用するインターネット経由の接続はルータのセキュリティ設定やPCのファイヤーウォールなどによって接続できない場合が多くあります。 [ 保証されない接続方法 ] ローカルネットワーク、インターネット経由の接続 [ 保証される接続方法 ] LANケーブルの直接接続(アンチウィルスソフトは無効であること) セキュリティはご自身で担保してください: ローカルネットワーク経由で接続する場合にクライアントがホストにアクセスするために必要な情報はホストIPアドレス+ポート番号のみです。インターネット経由(WebRTC)で接続する場合に必要とする情報は設定したキーのみです。単純な接続プロセスを採用していますので、セキュリティー対策はご自身の責任で行ってください。ソースコードはオープンソースとしてGitHubで公開しています(一部モジュールを除く)。 インターネット経由での接続を有効化する手順 設定ファイルを開きます。 $ cd ~/pserver $ nano jetbot-vr180x1-config.json インターネット経由で接続するための設定: # 入力例 “wrtc_enabled” : … Continue reading Jetson NanoでPicam360を始めよう – 6: 接続する