Oculus Quest2の解像度に最適なVRライブストリーミングカメラ
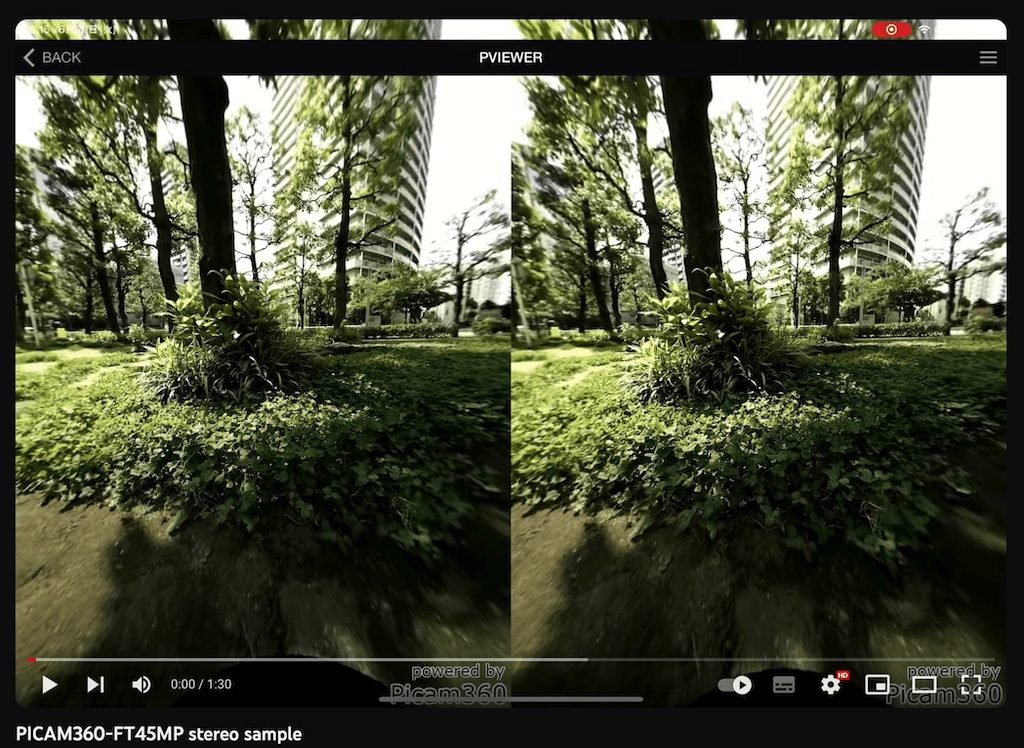
HQカメラシリーズのサンプル映像をyoutubeで公開しました。 PICAM360-FT45MP stereo Resolution quality: Full-HD quality for one eye Data rate setting: 4Mbps Network: mobile 4G Glass to glass latency: 100ms or more Streaming device: Jetson Xavier NX Viewer device: iPad Air 2022 片目あたりフルHD品質なので、Oculus Quest2で見た時にばっちりな解像感を得ることができます。 Picam360 store: https://store.picam360.com/ja/store#!/PICAM360-FT45MP/p/449143505/category=0 レイテンシーについて: https://blog.picam360.com/hq-camera-latency/ Picam360 Links: Web…
VR live streaming camera perfect for Oculus Quest2 resolution
One sample video from the High Quality Camera series is now available on youtube. PICAM360-FT45MP stereo Resolution quality: Full-HD quality for one eye Data rate setting: 4Mbps Network: mobile 4G Glass to glass latency: 100ms or more Streaming device: Jetson Xavier NX Viewer device: iPad…
レイテンシーを測定したみた; 100ミリ秒以下の高速ストリーミング!
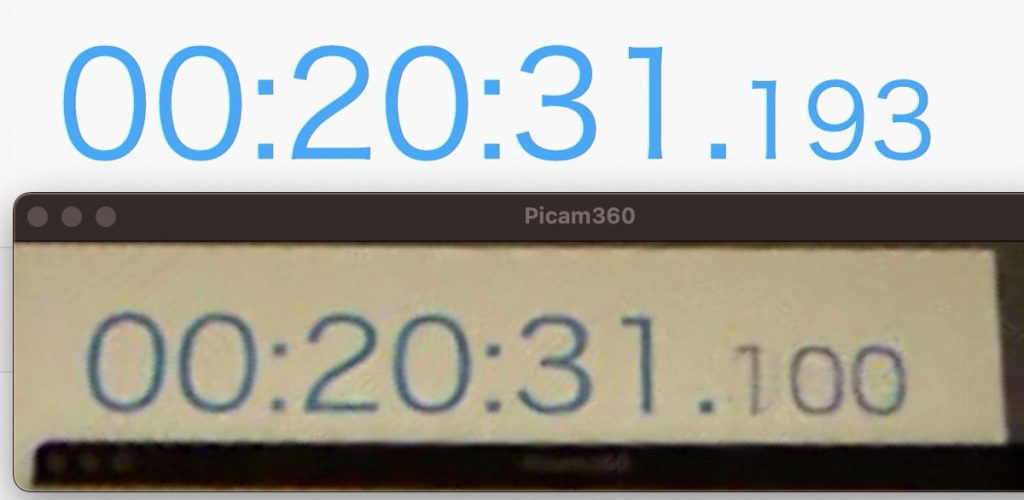
Picam360のハイクオリティーシリーズは、高解像度と高画質が特徴です。また、ライブストリーミングに重要なレイテンシーが非常に低く、高速ストリーミングが可能です。 今回はGlass-to-Glass(*)の遅延時間を計測しました。 (*) カメラに光が入力されてから、ネットワーク経由でディスプレイに表示されるまでの時間。 ハイクオリティカメラシリーズの特徴 高解像度:全天球換算で最大14K 高感度 低遅延 PICAM360-FT45MP https://store.picam360.com/store#!/PICAM360-FT45MP/p/449143505/category=0 PICAM360-FT21MP https://store.picam360.com/store#!/PICAM360-FT21MP/p/449143507/category=0 ウェブストアでは販売しておりません。売り切れと表示されていますが、ご購入の際は直接お問い合わせください! https://www.picam360.com/corporate/faq 測定条件 カメラ:FT45MP、単眼(ステレオでない) FPS:全天球換算7Kの30FPS ソフトウェア:通常のPicam360ストリーミングソフトウェア ストリーミング設定:1024×1024ピクセル 500kbps 視野方向(中心)がフルHD画質になる設定 ネットワーク:ローカルWIFI ディスプレイ:PCモニターMeasuring Method 測定方法 ディスプレイにストップウォッチを表示して撮影。同じディスプレイにPicam360ビューワーの画面を 表示して、時間差を確認します。PCディスプレイの更新頻度の分、プラスマイナスの誤差 が出ますので、それも考慮します。使用したPCディスプレイの誤差は16.666msです。 結果 100msを下回り93msでした! 先ほど述べたPCディスプレイのリフレッシュレートの分、もっと遅延の小さい秒数(80ms弱)も確認できましたが、更新頻度の誤差を考慮の上、確実な数値は95msです。フルHD画質(画像サイズではなくユーザーが見る画質として)のVRストリーミングで、この遅延時間は非常に高速と言えます(おそらく他にはないと思います)。 以上、「レイテンシーを測定したみた」でした。 お問い合わせは下記までお願いいたします。 https://www.picam360.com/corporate/faq Picam360 Links: Web Site: https://www.picam360.com Web Store: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/
I measured the latency; very fast streaming, less than 100ms!
Picam360’s high quality cameras are characterized by high resolution and image quality. They also have very low latency, which is important for live streaming, and can stream at high speeds. This time, we measured the Glass-to-Glass (*1) delay time. (*) From the time light is…

Piloting Jetbot with a Playstation5 controller
Jetbot is piloted with a Playstation5 controller. Jetbot can be controlled with a Playstation5 controller. Jetbot is connected to the Internet, and the PC in the video is also connected to the Internet. controller is also controlling the Jetbot via the browser’s GamepadAPI. The…
JetbotをPlaystation5のコントローラーで操縦する
JetbotをPlaystation5のコントローラーで操縦します。 JetbotをPlaystation5のコントローラーで操縦できるようにしました。 動画はJetbotをネット経由で遠隔操作している状況を撮影したものです。Jetbotはネットに接続されていて、動画に登場するPCもネットに接続しています。Jetbotの映像はネットを経由してPCのブラウザで表示していて(WebRTC)、Playstation5のコントローラーもブラウザのGamepadAPIを通じてJetbotを操作しています。 動画に登場するJetbotにはPicam360を2つ取り付けていて3D表示できるようにしてあるのでOculus Quest2などのVRヘッドセットを使えば、リアルタイム3D映像を見ながらJetbotを操縦することができます。 Picam360リンク: ウェブサイト: https://www.picam360.com ウェブストア: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/

Starlink+Amimon CONNEX: 地球上のあらゆる場所で、360度の映像をリアルタイムに遠隔操作するためのネットワーク構想
Starlink+Amimon CONNEX: 地球上のあらゆる場所で、360度の映像をリアルタイムに遠隔操作するためのネットワーク構想。 1. Starlink 海上や山間部の場所では、モバイルネットワークが届きません。一方、ドローンや重機などの遠隔操作の対象は、そうした場所での運用が求められています。スターリンクは、世界中の(ほぼ)どこにでもつながるネットワークを提供してくれます。ありがとう、スターリンク。 2. Amimon CONNEX Picam360をリモートで使用する場合、リモートデバイスとネットワークルーターとの接続は、これまでWIFIを使用していました。WIFIを使う以外に選択肢がないため、これがラストワンマイルの壁になっていました。 「ラストワンマイル」という言葉は、もともと電気通信業界で「最も近い基地局とユーザーを結ぶ通信回線の最後の区間」という意味で使われていました。現在では、「ユーザーにサービスを提供するための最後の区間(障壁)」という意味で使われています。 ドローンに詳しい方にはおなじみの、HDMI映像を無線で高速伝送する「Amimon Connex」。Amimonのデータ伝送仕様は、通常の360度映像フォーマット(正距円筒図法)には1フレームのデータサイズが小さすぎます。しかし、Picam360の映像圧縮技術は、アミモンのデータ伝送仕様と相性が良く、Amimonを使えば高画質の360度映像の伝送が可能であることに気づきました。 ということで、まだ構想ですが、Starlinkを試してみたところPicam360が接続できることを確認できました。Amimon Connexがラストワンマイルのソリューションになることを期待し、今実装しているところです。Amimon Connexで良い結果が出れば、高画質の360度映像をリアルタイムでどこにでも配信できるオンリーワンのシステムになると考えています。 Picam360リンク: ウェブサイト: https://www.picam360.com ウェブストア: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/
Starlink+Amimon CONNEX: A network concept for remote control with real-time 360-degree video anywhere on earth
Starlink+Amimon CONNEX: A network concept for remote control with real-time 360-degree video anywhere on earth. 1. Starlink Mobile networks cannot reach places at sea or in the mountains. On the other hand, there is a demand for drones, heavy machinery, and other remotely operated…

Nrealに対応しました
PViewerのUnityアセットが、新たにNrealに対応しました。 対応機種に Nreal が追加されました。 Picam360リンク: ウェブサイト: https://www.picam360.com ウェブストア: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/
Nreal is now supported
Unity asset of PViewer is newly compatible with Nreal. Nreal has been added to the list of supported models. Picam360 Links: Web Site: https://www.picam360.com Web Store: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/

Virtual exhibition in VR
Immersive 3D video + live streaming + audio communication:Why not do what you can’t do at a real exhibition at a virtual exhibition? In a previous article, we introduced a case study of the use of Picam360 at a exhibition show. Use Case | Remotely…
VRでバーチャル展示会
没入感のある3D映像+生配信+音声コミュニケーション:リアル展示会ではできないことをバーチャル展示会で実現してみませんか? 以前の記事で、Picam360を展示会で活用した事例をご紹介しました。 【活用事例】ステレオVR映像をライブストリーミングしてリモート出展 上述の活用事例では、展示会場に入らない大型設備のリモート展示に使っていただきました。 バーチャル展示会は、リアルな展示会と比較していくつかのメリットがあります。 展示会場には設置できないものでも展示できる 遠方の顧客にもアプローチできる 開催コストが低い 開催時間が自由 天候で客足遠のくことがない 密にならない ここで言うバーチャル展示会はウェブ上にCGで擬似空間を作るタイプではなく、実際の立体映像をリアルタイムに配信します。360度映像を生配信できるカメラやシステムはありますが、画質を例に挙げると4Kで40Mbpsといったように、画質が低く(360度の撮影範囲で4Kは低画質)かつ必要な通信速度は高い、というものが多く、リアルタイムで配信するにはハードルがあります。 Picam360は皆さんが見慣れているYoutubeやAmazon Prime Video等と同じレベル(表示画面画質でFullHD)の画質でしかもステレオ3D映像を4Mbpsで配信できます。モバイルネットワークでも配信できるので、バーチャル展示会を実現するツールとしてご活用いただけます。 今回は、遠隔地に説明員を置いて視聴者と会話しながら説明する、というケースを例にして使い方をご紹介します。 説明員: 説明員は視聴者から遠く離れた遠隔地にいます。 説明員はカメラの前に立って通話用ヘッドセットを付けています。説明員は視聴者と会話しながら商品について説明します。 まず、説明員のスマホとBluetoothヘッドセットをペアリングしておきます。 次にスマホにPViewerアプリ(iOSまたはAndroid)をインストールします。 配信の開始は、通常の使い方通りでアプリのCONNECTから接続します。この時に”Meeting”を選択して接続します。 “Meeting”は音声通話機能です。同じカメラに”Meeting”で接続すると2人以上でも複数人会話をすることができます。 視聴者: 今回は2名が同時に視聴します。 Meta Quest2を使用しています。Meta Quest2以外にもQuest1やスマホも使用できます。 Questやスマホはマイクが付いているので、外付けマイクは不要です。 Meta Quest2にPViewerアプリをインストールします。 配信の開始は、通常の使い方通りでアプリのCONNECTから接続します。この時に”Video+Meeting”を選択して接続します。”Video+Meeting”は映像と音声通話を指定しています。 以上、使い方の説明でした。 冒頭の活用事例ではリアル展示会と遠隔地を繋ぎました。リアル展示会場のネットワークは混線しやすい環境です。モバイルネットワークを使っていて安定しない場合は複数の携帯キャリアーを試してみて、繋がりやすいキャリアを選択すると良いと思います。 ご質問等ありましたら、公式ウェブサイトの問い合わせページからお問い合わせください。 Picam360リンク: ウェブサイト: https://www.picam360.com ウェブストア: https://store.picam360.com Twitter: https://twitter.com/picam360 Facebook: https://www.facebook.com/Picam360/